Funktionsweise
Die Funktionsweise eine Schrittmotors kann man an einem einfachen Schrittmotor gut erklären:
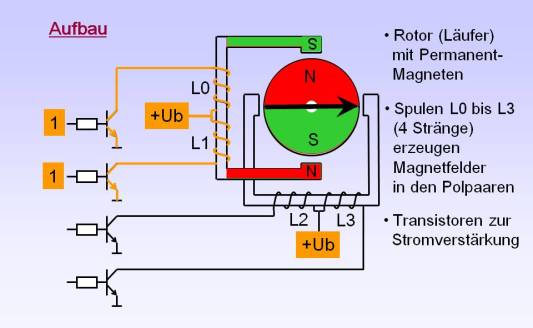
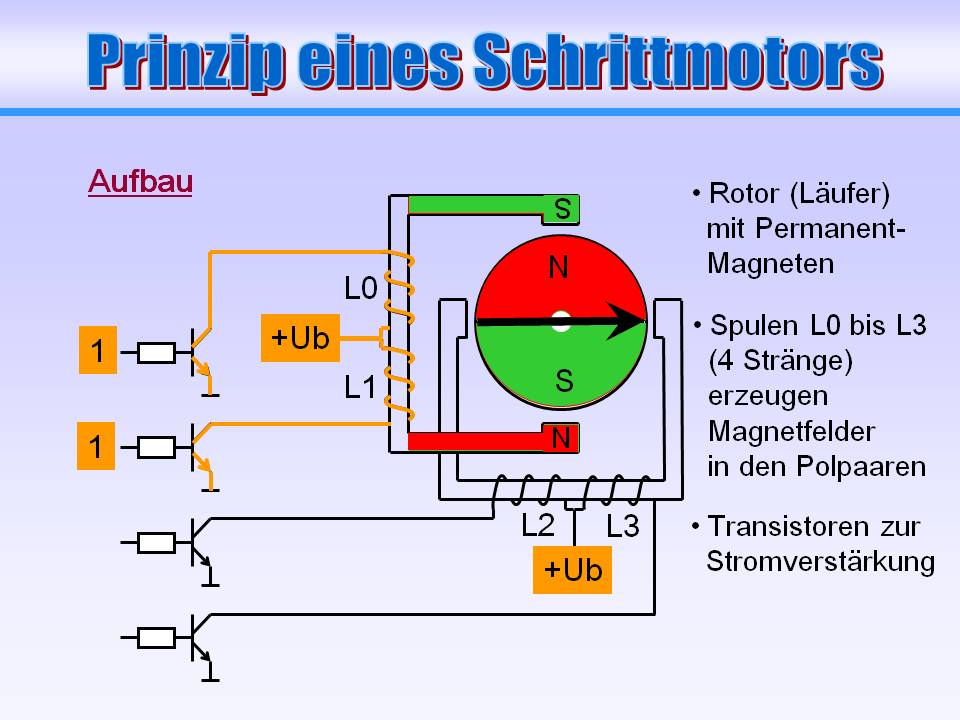
Er besteht aus einem Rotor mit zwei Permanent Magneten, vier Spulen (L0 bis L3) die ein Magnetfeld in den vier Polen erzeugen.
Die Spulen sind mit vier Transistoren, die das von dem Steuergerät kommende Signal verstärken, verbunden.
Um den Schrittmotor nun in Bewegung zu setzen wird an den Eingängen der Transistoren Spannung angelegt, sommit liegt auch an den Spulen Spannung an.
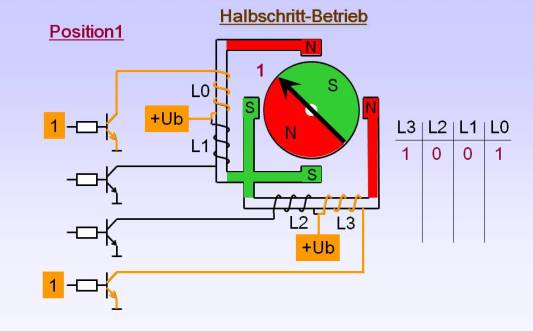
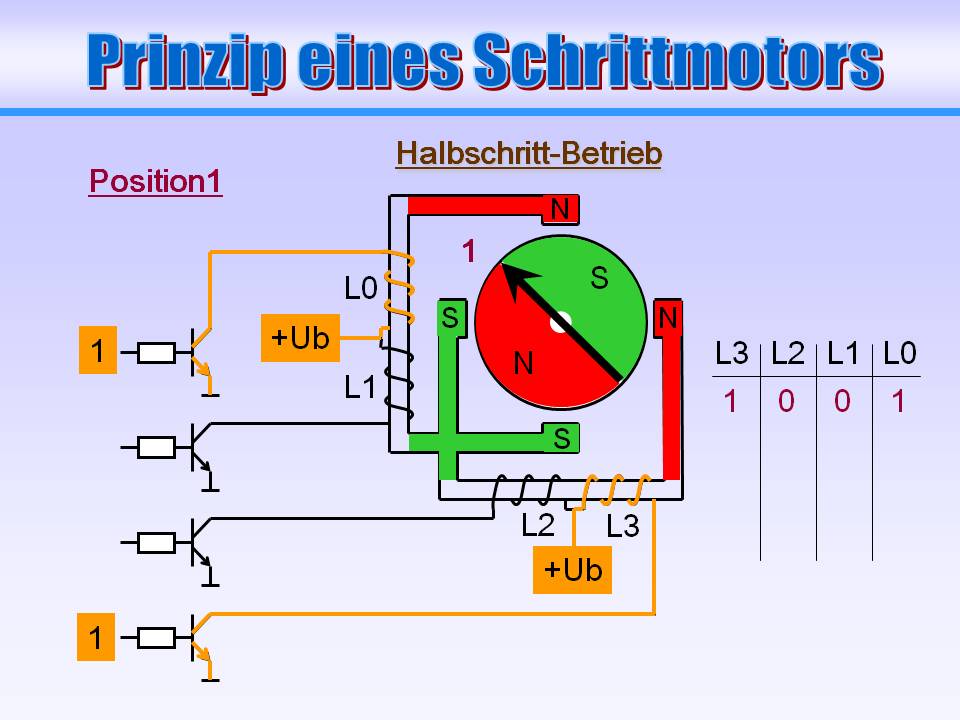
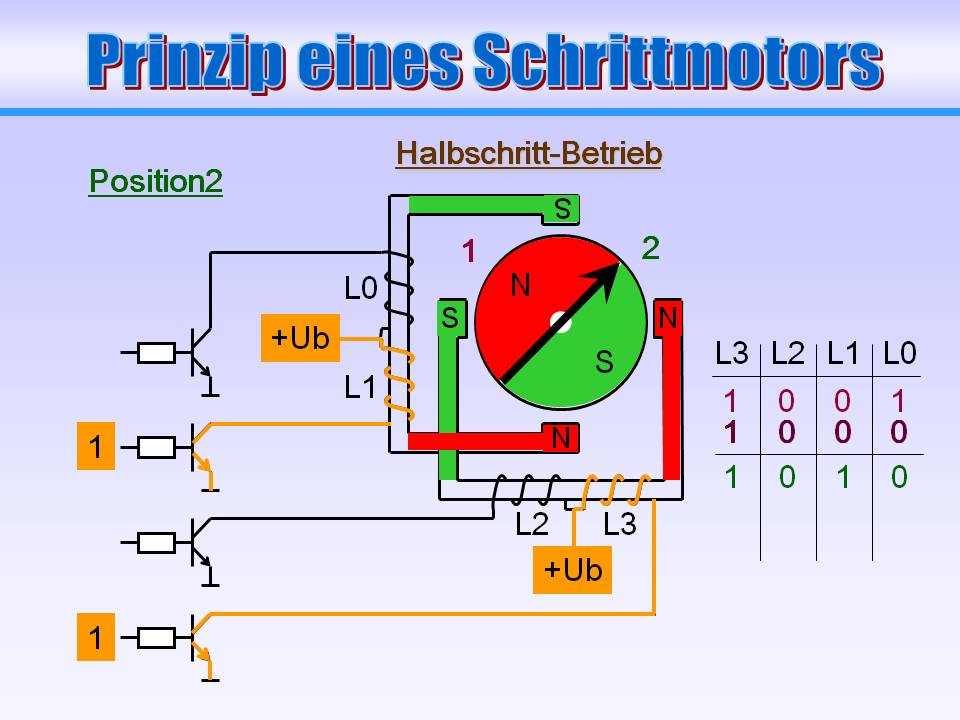
Zuerst wird die Spannung an die Spule L0 und L3 gelegt sodass an dem oberen und am rechten Pol ein positives und am unteren und am linken Pol ein negatives Magnetfeld anliegt!
Der Rotor dreht sich so das der positive Permanent Magnet nach unten/links und der negative Magnet nach oben/rechts zeigt!
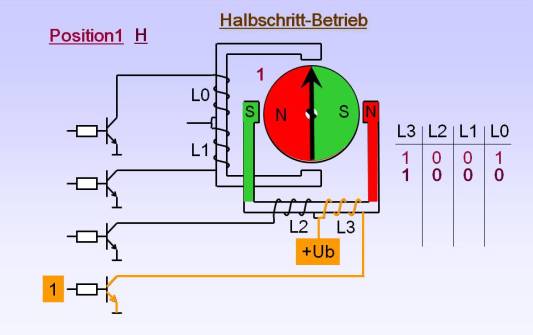
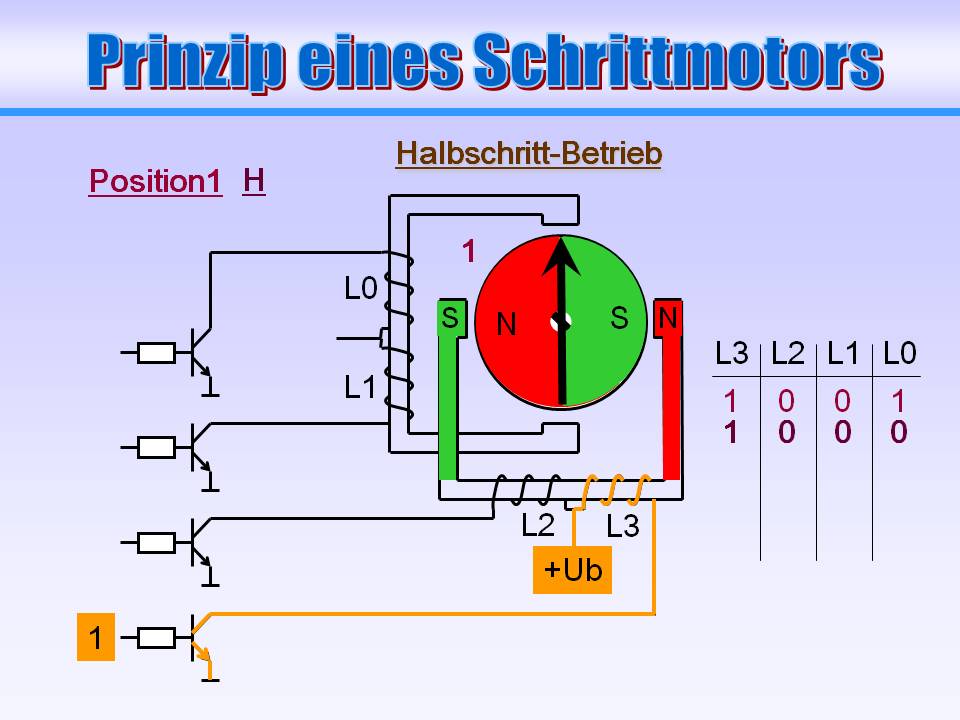
Nun wird nur an der Spule L3 Spannung angelegt sodass nur noch an dem linken Pol ein negatives und am rechten Pol ein positives Magnetfeld anliegt sodass sich der Rotor um einen halben Schritt weiterdreht!

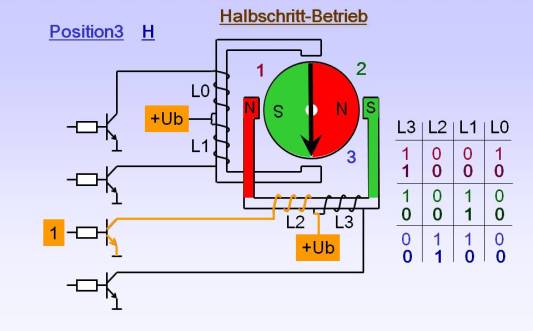
Nun wird an der Spule L3 und L1 eine Spannung angelegt und das Magnetfeld wandert weiter.

Jetzt liegt nur an der Spule L1 Spannung an sodass der Rotor sich wiederum um einen halben Schritt weiterbewegt!

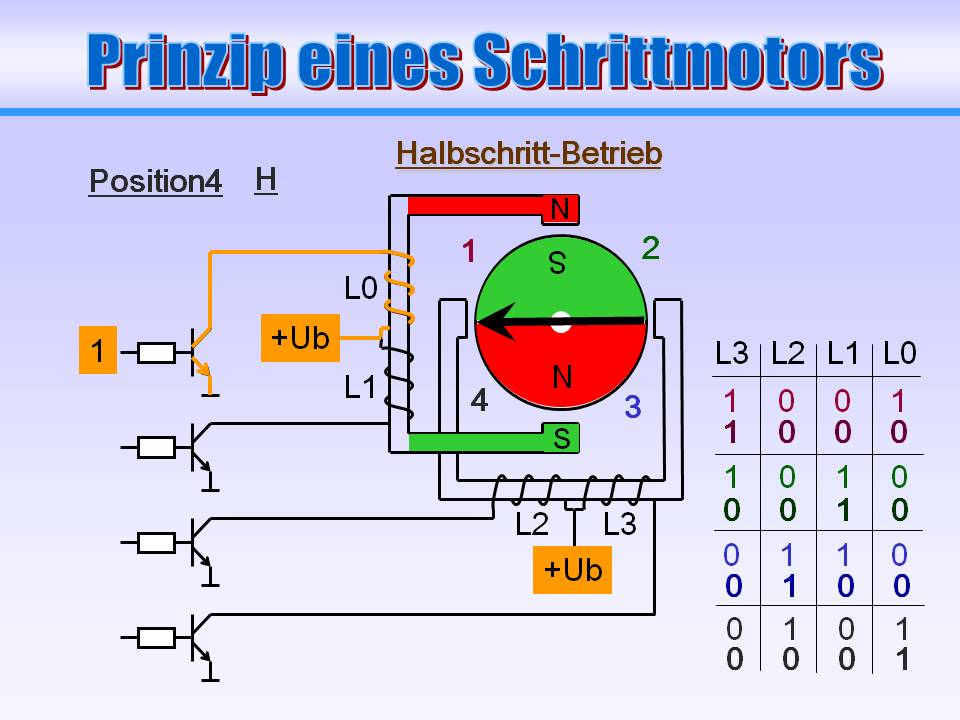
Die Spannung liegt nun an den Spulen L1 und L2, das Magnetfeld ist nun genau umgekehrt als am Anfang so hat der Rotor insgesamt eine halbe Umdrehung zurückgelegt!
Die Spannung an L1 wird ausgeschaltet sodass nur noch an der Spule L2 eine Spannung anliegt und der Rotor sich wieder einen halben Schritt weiterbewegt!

An L0 und L2 Liegt Spannung an das Magnetfeld wandert wieder weiter und der Rotor dreht sich in Position 4!

Nachdem die Spannung nur noch an der Spule L0 liegt ist der Rotor nur noch eine achtels Umdrehung von seiner Uhrsprungsposition entfernt und es beginnt wieder mit Schritt 1!
Variationen:
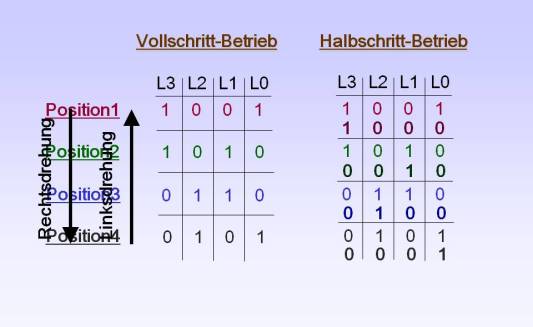
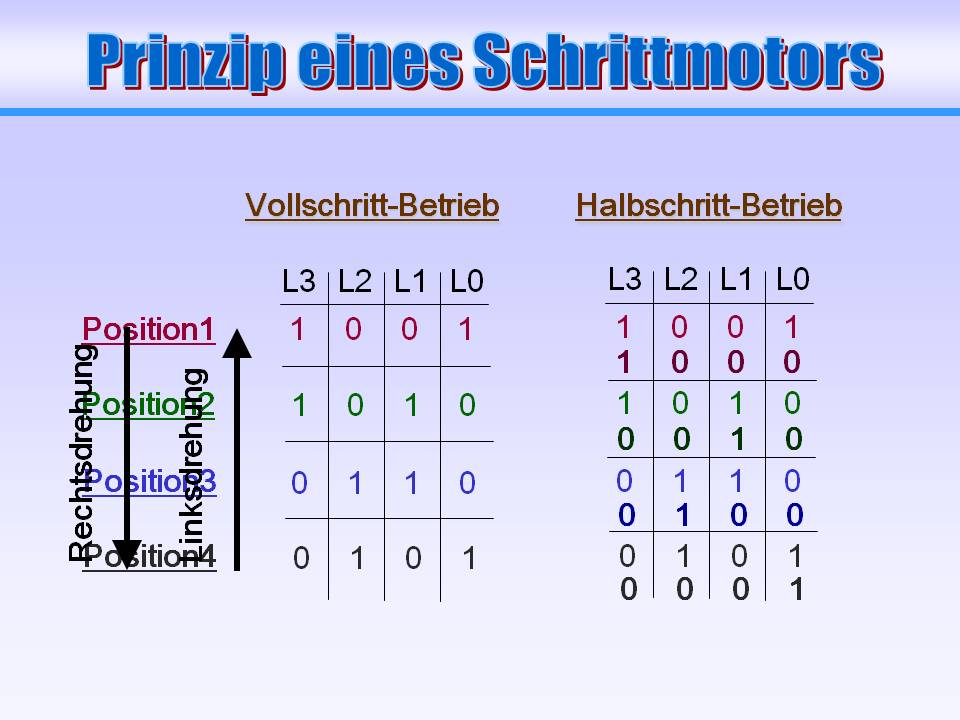
Das oben aufgeführte Zenario zeigt den Halbschritt-Betrieb eines Schrittmotores im Uhrzeigersinn!
Beim Vollschritt-Betrieb sind immer alle Pole polarisiert so dass immer an zwei Spulen Spannung anliegt und es anstatt 8 Halbschritte nur 4 Schritte gibt, dazu werden einfach die Halbschritte übersprungen!
Auch kann mann den Schrittmotor Rückwärts laufen lassen dazu werden die Spulen einfach im umgekehrter Reihenfolge angesteuert!
Da mit solch einem "einfachen Schrittmotor" nur 8 Verschidene Schritte für eine Umdrehung möglich sind,
aber z.B. jener Schrittmotor den wie in unserem Projekt verwendeten insgesammt 100 Halbschritte kennt kommen meist etwas andere Bauformen zum einsatz:

Bei diesem "Stepper Motor" wandert z.B. ein Magnetfeld von einer zur nächsten von 4 Spulen und durch die Zahnradsform des Rotors sowie die Anordnung der "Zähne" an den Spulen wandert der Motor immer ein Stück weiter!
Bildquelle der Folien: CD uC_ProgLogSchueler PowerPoint "Schrittmotor.ppt" von Gerhard Neumaier und Jürgen Schnaiter "\uC_ProgLogSchueler\ProgLogik_SchuelerCD\ABEL_Bsp_Offenburg\Schrittmotor ProgLogik\Aufgaben\Schrittmotor.ppt" Alle Rechte und das Copiright an den Grafiken liegt bei Gerhard Neumaier und Jürgen Schnaiter
Bildquelle "StepperMotor" Mrgoogfan, Wikipedia http://de.wikipedia.org/w/index.php?title=Datei:StepperMotor.gif GNU Free Documentation License.
© 2010 Georg Sauer, Löhliswälderstraße 63 77746 Schutterwald





{kind=link}